


MULES, ÉCLAIREURS ET OIP
DES NOUVEAUX OPÉRATEURS DANS LE TERRESTRE
Depuis la première utilisation significative de robots terrestres militaires dans des conflits asymétriques en Irak et en Afghanistan, les progrès technologiques significatifs accomplis promettent à ces systèmes une place incontournable dans le combat aéroterrestre asymétrique ou symétrique, y compris de haute intensité. Au plan opérationnel, les robots permettent de générer de la masse à coût contenu du fait de leur nature consommable, en complément de systèmes d’armes modernes plus complexes et plus couteux.
Etat des lieux
Les premières utilisations de robots visaient à préserver les personnels des engins explosifs improvisés (EEI) et à fournir une assistance dans la reconnaissance de lieux confinés. Il s’agissait essentiellement de petits engins télécommandés (de quelques centaines de grammes pour des « caméras à roulettes » jusqu’à 200 ou 300 kg pour les engins de déminage les plus lourds), équipés de caméras (reconnaissance) et/ou de bras manipulateur (lutte contre les EEI), employés à plusieurs milliers d’exemplaires sur le terrain. L’US Army estime que ces microrobots ont permis de sauver plusieurs dizaines de vies et ont acquis une légitimité opérationnelle qui les rend désormais incontournables.

Les robots télécommandés NERVA-LG et NERVA-XX
Enjeux et axes d’effort technologiques
Cette première génération de robots ne constituait cependant qu’une évolution technologique des moyens mis à la disposition du combattant avec quelques ajustements de la doctrine, mais sans changement radical des modes opératoires du combat. L’efficacité prouvée sur le terrain, associée à une maturation rapide des technologies utilisées, permet désormais leur développement dans deux directions :
• l’extension des missions réalisées : la possibilité de confier à des robots les tâches « 3D » (Dangerous, Dull and Dirty) reste l’une des principales motivations de leur emploi opérationnel : on préserve l’opérateur du danger, notamment en l’éloignant des zones à hauts risques, tout en le déchargeant des tâches ingrates afin qu’il puisse se concentrer sur celles à forte valeur ajoutée. Le robot est maintenant aussi considéré comme un potentiel élément de rupture, capable de créer la surprise sur le terrain grâce à la diversité des solutions techniques qu’il permet de mettre en œuvre ; cette approche « techno-push » constate tout d’abord les capacités techniques accessibles et cherche les effets opérationnels qu’elles permettraient d’obtenir. Les récents conflits asymétriques sont la parfaite illustration de cette démarche, des microdrones aériens disponibles sur catalogue pour quelques centaines d’euros ayant par exemple été transformés en mini-bombardiers capables d’agresser des personnels au sol. Des microrobots capables de reconnaître puis percer les roues de véhicules postés ou encore des microdrones capables de déposer de la peinture sur les épiscopes d’un véhicule pour l’aveugler, sont deux exemples d’applications de rupture que l’Intelligence Artificielle rend désormais accessibles à moindre coût.
La polyvalence et la modularité des microrobots NERVA de Nexter, dont l’armée de Terre vient de faire une première acquisition, s’inscrivent parfaitement dans ce schéma qui dote les forces d’une réactivité nouvelle ; le potentiel opérationnel accessible nécessite clairement un ajustement de la doctrine, afin de pouvoir tirer un profit maximal de ces nouveaux moyens.
• Le deuxième axe d’effort concerne l’autonomie, qu’elle porte sur la Mobilité (robot capable de naviguer sans télécommande par un opérateur) ou qu’elle soit Décisionnelle (robot capable d’analyse et de prise de décision). Ces développements permettent à ces systèmes d’agir en groupes coordonnés ou en concertation avec des éléments habités, d’envisager des emplois nouveaux dans lesquels le robot n’est plus uniquement considéré comme un substitut à l’homme. Même si cet axe d’effort s’applique également aux microrobots, il est considéré comme un différentiateur majeur dans le développement récent des robots plus lourds (les Robots Tactiques Polyvalents : RTP). Ce nouveau segment est exploré par de nombreux pays, y compris par certains qui n’étaient pas considérés comme des puissances militaires majeures et qui voient dans la robotique un moyen de conquérir la place qu’ils revendiquent, notamment grâce aux possibilités de « nivellement capacitaire » qu’un emploi massif de la robotique laisse entrevoir.
Un accroissement de l’autonomie des systèmes robotisés conduit également à reconsidérer en profondeur les interactions avec les opérateurs humains. Les robots ne seront à l’avenir plus entièrement télécommandés comme les premières générations de microrobots (dont un opérateur humain assurait 100% du contrôle), et ne seront pas non plus entièrement autonomes à court terme (ce n’est d’ailleurs pas la finalité recherchée). L’enjeu consiste à répartir les tâches entre l’opérateur humain et le robot, au prorata de leurs capacités respectives et des besoins de la mission, de manière à ce que le couple opérateur humain - robot fournisse une performance optimisée. Cette répartition évoluera au fur et à mesure de la maturation technologique jusqu’à ce que le robot acquière un véritable statut « d’équipier » du combattant. Les efforts portent aujourd’hui essentiellement sur l’accroissement de l’autonomie de mobilité sous forme d’assistances au déplacement (notamment en milieu non structuré) telles que le « suivi en convoi », le « suivi de personnel débarqué », le « suivi de route ou chemin », le « ralliement d’objet », etc. Ainsi déchargé des tâches de gestion de la mobilité, l’opérateur humain peut ainsi se concentrer sur le cœur de la mission opérationnelle.
Applications opérationnelles considérées
Au-delà des applications « historiques » de la microrobotique, notamment la reconnaissance, la gestion des EEI et les tâches EOD (Explosive Ordnance Disposal), l’emploi opérationnel de la robotique lourde (RTP) est actuellement activement considéré pour les missions suivantes :
- reconnaissance : missions identiques à celles des microrobots mais avec des capacités supérieures (mobilité en tout terrain, allonge, portée des capteurs, …) rendues possibles par le gabarit des plateformes ;
- surveillance de site sensible : avec notamment des capacités de patrouille entièrement automatiques alliées à des capacités de détection d’intrusion ou plus généralement « d’événement anormal ». Des solutions impliquant une coopération entre drone aérien et robot terrestre sont aussi accessibles ;
- transport logistique automatisé (« Mule ») : des solutions autonomes sont d’ores et déjà proposées pour transporter des équipements sur un itinéraire donné ou pour suivre automatiquement un groupe de combat sur le terrain ;
- ouverture d’Itinéraire Piégé (OIP) : les robots ouvrent la voie afin de détecter, leurrer ou neutraliser d’éventuelles menaces (EEI ou autres) placées sur l’itinéraire ;
- combat : le « robot armé » est une extension des tourelles téléopérées équipant la plupart des véhicules de combat actuels, l’opérateur humain se trouvant simplement plus éloigné de l’arme qu’il ne l’est dans un véhicule. Il convient de noter que de nombreux pays, dont la France, interdisent l’utilisation de Systèmes d’Armes Létaux Autonomes (SALA), qui décideraient seuls de la cible et du tir. Pour autant, il est néanmoins indispensable d’étudier dans ce cadre les moyens qui permettraient de lutter contre d’éventuels SALAs déployés par des armées évoluant dans un cadre éthique différent ;

OPTIO 20, un drone terrestre lourd THeMIS équipé d’un canon de 20mm
Des solutions existent dès à présent pour toutes les applications citées et les axes d’effort portent sur l’extension du domaine de fonctionnement accessible : accroissement de l’autonomie, extension des conditions d’emploi (typologie des terrains, conditions climatiques, …), augmentation de l’allonge, couplage étroit avec les systèmes d’armes existants, etc.
Quelles que soient les évolutions technologiques envisageables pour améliorer les performances des robots terrestres militaires, il importe de ne pas perdre de vue que l’opérateur humain restera au cœur de l’engagement, le robot devant d’une part rester un moyen à son service, et le couple opérateur humain - robot devant d’autre part conserver une capacité globale de résilience le rendant capable de mener à bien la mission y compris avec des modes dégradés.
 |
Nicolas Chamussy, ICA, CEO de Nexter Nicolas Chamussy (X, ENSTA) a été conseiller au cabinet du ministre de la Défense, avant de rejoindre la direction du budget du ministère de l’économie et des finances. Après divers postes chez EADS, il devient directeur de cabinet du PDG d’EADS et est nommé en 2016 directeur des systèmes spatiaux de la division Airbus Defense & Space.
|
Auteur
Articles liés par des tags
-
- ETENDRE LA FORCE NAVALEETENDRE LA FORCE NAVALE Alors que dans le domaine aérien, les drones sont depuis de nombreuses années au stade de...04 mars 2022Lire la suite >
-
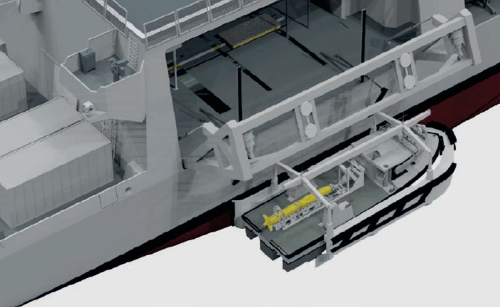
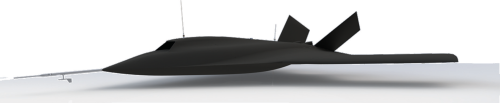
- LE DÉMONSTRATEUR DE DRONE SOUS-MARIN OCÉANIQUELE DÉMONSTRATEUR DE DRONE SOUS-MARIN OCÉANIQUE La Lutte Sous la Mer (LSM) réapparait comme un enjeu clé sur la décennie et cela se traduit...05 mars 2022Lire la suite >
-
- UNE CARRIERE DANS LES DRONESUNE CARRIERE DANS LES DRONES Damien Raby, X88, SUPAERO, Ecole de l’Air, a été ingénieur de marque Mirage 2000-5 export puis...06 mars 2022Lire la suite >
-
- AUTOMATISER L’INSPECTIONAUTOMATISER L’INSPECTION On connait les drones utilisés pour inspecter les ouvrages d’art. Il fallait de l’audace pour...07 mars 2022Lire la suite >
-
- STRATOBUS : UNE SURVEILLANCE EN CONTINU DEPUIS LA STRATOSPHÈRESTRATOBUS : UNE SURVEILLANCE EN CONTINU DEPUIS LA... Pour le renseignement et les télécommunications, un nouveau segment est apparu, celui des HAPS, qui...08 mars 2022Lire la suite >
-
- L’IMAGINATION EST LA SEULE LIMITE À CE QUE PEUT FAIRE LE ZEPHYRL’IMAGINATION EST LA SEULE LIMITE À CE QUE PEUT FAIRE LE... À cette altitude, trop élevée pour les avions commerciaux, mais trop basse pour les satellites, les...09 mars 2022Lire la suite >
-
- LES DRONES AÉRIENS AU SEIN DES FORCES ARMÉES AMÉRICAINESLES DRONES AÉRIENS AU SEIN DES FORCES ARMÉES AMÉRICAINES Motivée par les besoins opérationnels urgents des opérations d’Afghanistan puis d’Irak, poussée par...10 mars 2022Lire la suite >
-
- MON AFFECTATION TEMPORAIRE CHEZ PARROTMON AFFECTATION TEMPORAIRE CHEZ PARROT Parrot est l’un des leaders du marché des micro-drones (dont le poids est de l’ordre du kilo) aux...11 mars 2022Lire la suite >






Aucun commentaire
Vous devez être connecté pour laisser un commentaire. Connectez-vous.