


ROSETTA & PHILAE, DEUX CONCEPTIONS TRÈS DIFFÉRENTES
UN ATTERRISSAGE FOU, FOU, FOU !
A plus de un milliard d’euros, le véhicule rosetta de plus de 3 tonnes est le fruit d’une technologie très sophistiquée. Philae, résultant d’une coopération de plus de 10 acteurs européens, est un petit engin à l’intelligence réduite mais optimisée pour atterrir sur une comète. L’un et l’autre possèdent une dizaine d’instruments scientifiques destinée à découvrir l’origine de notre système solaire.
Le 12 novembre dernier eut lieu un évènement spatial dont le retentissement mondial a rappelé pour certains commentateurs celui du 21 juillet 1969. Même si la dramaturgie de l’atterrissage d’un homme sur la Lune n’est en rien comparable à celle d’un modeste engin de 100 kg, le fait d’atterrir sur une comète, un corps planétaire mystérieux et hostile, a suscité une curiosité similaire au premier pas de l’homme sur la Lune. Cet exploit, car c’en est un, est dû à la combinaison de deux acteurs : le véhicule porteur, Rosetta, et le petit atterrisseur Philae.
Rosetta, un bijou de l’industrie spatiale européenne
L’orbiteur a une masse de 3 tonnes et a été conçu par Airbus Defence & Space sous la maitrise d’ouvrage de l’ESA. Sa mission : aller à la rencontre d’une comète dont l’environnement est variable et peu connu. Son voyage devait durer une décennie et ses capacités de navigation devaient être d’une grande fiabilité afin de s’adapter à des perturbations dues aux gaz émis par la comète ainsi qu’aux chocs par des grains ou des graviers. Mais il devait aussi être robuste face à des perturbations venant de ses immenses panneaux solaires (32 m) qui représentent une « voile » induisant des forces sur l’attitude et la position de l’engin. Cette navigation dans un environnement inconnu nécessite une grande autonomie et de pouvoir s’adapter à des situations non nominales. Tout véhicule spatial a la capacité de garantir sa survie en se mettant dans un mode sécurisé, ou safe mode, qui lui assure d’être alimenté en énergie et en mesure de communiquer avec la Terre. C’est l’état de l’art mais ce n’est pas toujours bien maîtrisé. On pourrait citer nombres de sondes qui ont été perdues faute d’un mode de sécurité suffisamment robuste.
Une navigation innovante
La navigation de Rosetta est très singulière, car elle combine une somme de difficultés inégalée : très longue croisière, multiples assistances gravitationnelles, mode d’hibernation, et, last but not least, approche et navigation au voisinage d’un petits corps actif. L’activité d’une comète modifie sa trajectoire par rapport aux lois de la gravitation du fait des forces de réaction sur le noyau des jets de gaz qui s’en échappent. Sa position dans l’espace est en définitive mal connue, de surcroît le noyau est généralement invisible masqué par un halo de poussières. Rosetta utilise pour naviguer des caméras dédiées qui permettent de piloter la sonde à vue ! La position du noyau est précisément établie à l’aide des images mais également sa vitesse relative à la sonde. Lors de l’arrivée à la comète début août, Rosetta a ainsi effectué des spirales triangulaires pendant la phase ultime d’approche. A l’extrémité de chaque côté du triangle, elle activait ses propulseurs pour parcourir de façon inertielle le côté suivant. Cette procédure innovante permettait d’observer le noyau, d’en déterminer précisément la position et les dérives temporelles mais aussi d’en mesurer la masse par l’analyse précise de la déflection de l’arc du triangle par rapport à une droite.
« Go » pour Philae
Pour le largage de Philae le 12 novembre, les opérateurs de la sonde ont dû exceller afin de rendre cette manœuvre la plus précise possible. En effet, pour des raisons à la fois de vitesse maximale à l’atterrissage (limitée à 1 m/sec) et de sécurité pour l’orbiteur, il était prévu de larguer Philae depuis une trajectoire « rase cailloux » à une altitude de 20 km. Dès le largage, Rosetta a effectué une manœuvre d’évitement afin de s’éloigner de la comète et de se positionner à grande distance afin d’optimiser le recueil des données du petit robot. Toutes ces manœuvres devaient être téléchargées à bord et effectuées de façon autonome. En effet, à 30 minutes-lumières de la Terre, il n’est pas possible de téléopérer la manœuvre. La position de Rosetta par rapport à la comète mais aussi sa vitesse et son orientation devaient être les plus précises possibles dans un environnement composé de jets de gaz et de grains pouvant perturber la trajectoire. L’ellipse d’erreur (99 % de chance d’atterrir dans l’ellipse) était d’environ 1 kilomètre dans sa plus grande dimension. Le mécanisme de largage de Philae devait lui aussi être très précis. Pour des raisons que je ne détaillerai pas ici, le choix s’est porté sur une vitesse de largage de 19 cm/sec.
Tomber comme une pierre pendant 7 heures
Avant son largage, Philae avait mis en route sa roue à inertie qui lui permettait de maintenir fixe dans l’espace l’orientation du plan du train d’atterrissage. Philae pouvait néanmoins tourner autour de la verticale de ce plan ce qui s’est effectivement produit. L’atterrisseur n’avait aucun système actif de contrôle d’attitude qui aurait été trop lourd à embarquer. Philae s’est donc laissé tomber comme une pierre pendant les 7 heures de la descente. Peu après le largage, des photos de Rosetta prises par Philae et de Philae prises par Rosetta ont confirmé que le début de la descente était nominal et que Philae était stable pendant la descente.
Atterrissage mouvementé
L’impact eu lieu à la minute près et à 120 mètres du point visé, ce qui montre que les navigateurs planétaires de l’ESA et du CNES (pour la trajectoire de descente) ont fait un superbe travail parfaitement coordonné. Malheureusement 2 des 4 (+ 1) systèmes prévus pour éviter le rebond n’ont pas fonctionné. Oublions tout de suite les vis aux extrémités des pieds, celles-ci sont plus destinées à empêcher la rotation de Philae à l’atterrissage qu’à éviter le rebond. Le propulseur à gaz froid qui devait plaquer Philae au sol à l’impact était HS car la vanne du réservoir de gaz est restée fermée pour une raison encore mal comprise. De même les deux harpons chargés de nous ancrer dans le sol de la comète ne se sont pas déclenchés. Par contre, le vérin amortisseur situé au centre de Philae a parfaitement joué son rôle, amortissant l’impact en s’enfonçant de 4 cm. Cette valeur, plus faible que prévue, révèle que le sol de la comète (le 5ème système amortisseur !) est couvert d’une couche molle et amortissante de 20 cm d’épaisseur sous laquelle se trouve une couche de glace très dure. Telle une peau de tambour, cette dernière a propulsé Philae dans les airs dans une parabole mouvementée qui a duré 2 heures. La trajectoire précise a été déterminée et une collision sur un haut relief a même été établie. Après 2 rebonds, Philae est venu se caler entre 2 rochers où il a continué miraculeusement à dérouler sa séquence scientifique qui avait été téléchargée. Dans la nuit suivante, les opérateurs ont téléchargé une nouvelle séquence afin de prendre en compte la réalité de la situation. La logique retenue a été d’activer tous les 10 instruments du bord, ce qui a été fait. Mais tous n’ont pas pu collecter les informations scientifiques attendues.
Hibernation & Réveil
Après 57 heures d’activités intenses, Philae est tombé dans un profond sommeil avec l’épuisement de sa pile. Il devrait résister aux très basses températures qui règnent sur le « côté obscur » de la comète, dans l’ombre. Le temps joue en sa faveur. D’une part au passage au périhélie (point le plus proche du Soleil) le 13 août 2015, l’énergie reçue sera 6 fois plus importante que le 12 novembre. D’autre part, le Soleil devrait être au plus haut dans le ciel de Philae (c’est-à-dire l’été) au tout début septembre. Nul doute que Philae devrait se réveiller au printemps et compléter ses mesures durant l’été.
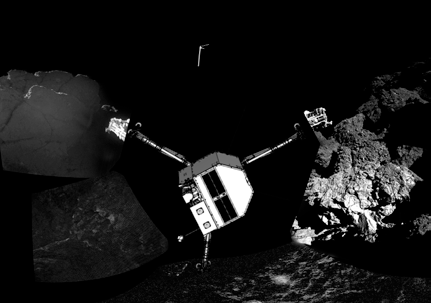
Le panorama de la comète vu par Philae. Le petit atterrisseur est calé entre deux rochers dont les dimensions sont inconnues. Les antennes du radar de CONSERT sont visibles sur les images. © ESA/Rosetta/Philae/CIVA
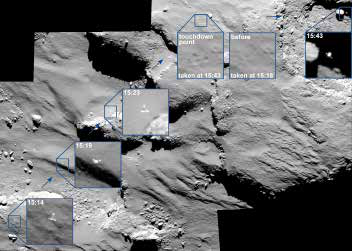
La descente de Philae suivi par la caméra de Rosetta avant et après le 1er rebond. Jusque-là tout allait bien ! © ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
 |
Francis Rocard, responsable des programmes d’exploration du système solaire du CNES
Francis Rocard, né le 23 mai 1957 à Paris, est astrophysicien, spécialisé en planétologie. Il débute sa carrière comme planétologue au CNRS et a participé aux missions VEGA de survol de la comète de Halley en 1986 et PHOBOS-88 d’étude minéralogique de la surface de Mars. En 1989, il entre au Centre national d’études spatiales où il est responsable des Programmes d’exploration du Système solaire.
|
Auteur
Articles liés par des tags
-
- « ROBOTS-TUEURS » : QUEL ENCADREMENT JURIDIQUE ?« ROBOTS-TUEURS » : QUEL ENCADREMENT JURIDIQUE ? L’organisation non-gouvernementale (ONG) Human Rights watch a lancé printemps 2013 une campagne de...13 avril 2015Lire la suite >
-
- GENTILS ROBOTS, MÉCHANTS ROBOTS ?GENTILS ROBOTS, MÉCHANTS ROBOTS ? Le 21ème siècle sera-t-il le siècle des robots ? de nombreux auteurs de science-fiction l’ont...15 avril 2015Lire la suite >
-
- SPIN-OFF DU LRBA À L’ORIGINE DE LA NAVIGATION MAGNÉTO-INERTIELLESPIN-OFF DU LRBA À L’ORIGINE DE LA NAVIGATION... En proposant des équipements de géolocalisation en environnement GPs-denied pour un coût 50 fois...16 avril 2015Lire la suite >
-
- FCAS, VERS L’ÈRE DES DRONES DE COMBAT ?FCAS, VERS L’ÈRE DES DRONES DE COMBAT ? Notifiée le 30 octobre 2014, la phase de faisabilité du projet fcas (Future Combat Air System)...17 avril 2015Lire la suite >
-
- LA GUERRE DES MINES NAVALESLA GUERRE DES MINES NAVALES Si, dans le domaine naval, les drones comprendront bien entendu des vecteurs aériens, une autre...18 avril 2015Lire la suite >
-
- CE QUE VEUT L’INTERNAUTECE QUE VEUT L’INTERNAUTE Le web moderne a vu les applications à la robotique et à l’intelligence artificielle exploser....19 avril 2015Lire la suite >
-
- EXPERTISE ROBOTIQUE TERRESTREEXPERTISE ROBOTIQUE TERRESTRE Depuis début janvier, nous sommes 14 IA (X 2010) à suivre notre formation administrative et...20 avril 2015Lire la suite >
-
- SANS LA ROBOTIQUE, PAS DE SPATIALSANS LA ROBOTIQUE, PAS DE SPATIAL Les lanceurs, les satellites ou les sondes interplanétaires possèdent tous des senseurs, des...21 avril 2015Lire la suite >
-
- LE NAVAL AU SERVICE DU SPATIALLE NAVAL AU SERVICE DU SPATIAL Le Véhicule de transfert automatique (ATV) développé par l’agence spatiale européenne (ESA), est...22 avril 2015Lire la suite >
-
-
- LE TRANSPORT EN 2050 : UN ESSAIM DE ROBOTS ?LE TRANSPORT EN 2050 : UN ESSAIM DE ROBOTS ? Que sera le transport en 2050 ? La voiture, si chère (dans tous les sens du terme) à bon nombre...25 avril 2015Lire la suite >
-
- QUELLE POLITIQUE INDUSTRIELLE POUR LA ROBOTIQUE ?QUELLE POLITIQUE INDUSTRIELLE POUR LA ROBOTIQUE ? Portée par un marché estimé à 100 milliards d’euros à l’horizon 2020, la robotique est au cœur de la...30 avril 2015Lire la suite >











Aucun commentaire
Vous devez être connecté pour laisser un commentaire. Connectez-vous.