


SANS LA ROBOTIQUE, PAS DE SPATIAL
Les lanceurs, les satellites ou les sondes interplanétaires possèdent tous des senseurs, des actuateurs et un ou des calculateurs. La robotique est une nécessité pour réaliser des missions spatiales. cependant son développement est freiné par les spécificités du milieu spatial : réparation impossible, environnement agressif, réactivité contrainte par le temps de latence des communications.mais le futur innovant et ambitieux ainsi que les contraintes financières ne pourront continuer à contenir la robotique dans des tâches limitées et à faible autonomie.
L’histoire du spatial est étroitement liée à la robotique. Les objets spatiaux évoluent dans un environnement hostile (rayonnement, vide …) pour l’homme. Sans une intelligence à bord, sans calculateur, les lanceurs et les satellites ne pourraient remplir leurs missions : pas de voyage interplanétaire, pas d’observation de la Terre, pas de télécommunication spatiale …
Le calculateur est le cœur névralgique d’un véhicule spatial. Il assure la gestion de la plate-forme (orientation du véhicule, contrôle thermique, gestion de la puissance, liaison bord/sol …) et des instruments.
La robotique au cœur des missions spatiales
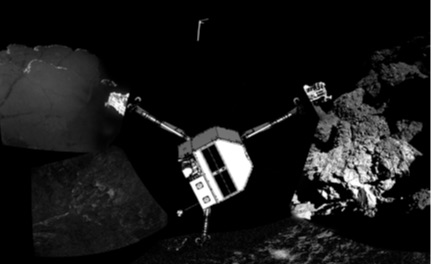
Le rendez-vous avec la comète Churyumov Gerasimenko est l’étape finale d’un périple qui aura duré 10 ans et qui aura été permis grâce à l’utilisation de l’effet de fronde des planètes au voisinage desquelles la sonde est passée. Selon les ordres reçus du sol, elle a effectué les poussées qui lui ont permis, avec une faible quantité d’énergie, de modifier sa trajectoire naturelle, fixée par les lois de Kepler. Si chaque manœuvre (dates et durées des poussées) a été définie au sol, c’est le calculateur, avec les viseurs stellaires et les actuateurs bord, qui repéra la position du véhicule, qui effectua les corrections d’attitude nécessaires, et déclencha le système de propulsion selon les consignes.
Pour un satellite d’imagerie optique comme Pléiades, un plan de travail est élaboré quotidiennement. Il indique les images à acquérir. Le centre de mission est responsable de sa construction (les instants de prises de vue, leurs durées, le ou les instruments à utiliser, la loi de guidage pour chacune d’elles), le satellite est en charge de sa mise en œuvre en utilisant les viseurs stellaires et les gyromètres pour se repérer, des actuateurs gyroscopiques pour se conformer aux lois de guidage qu’il a reçues, et en activant les instruments de prise de vue. A une vitesse de 7 km/s, la précision de pointage permet de viser un point au sol avec une précision 100 m et le pilotage garantit l’absence de vibrations qui donneraient des images floues. En outre, compte tenu du volume gigantesque de données produites, des traitements à bord réalisent les opérations de compression pour réduire ce volume sans altérer l’information contenue.
Pour le véhicule automatique européen (ATV) de desserte de la station spatiale internationale, l’arrimage suit une séquence complexe sous les directives du centre de contrôle. Les phases d’approche successives sont réalisées avec un pilotage du sol, la phase finale est complètement automatique avec 2 points d’attente à 3,5 km puis 250 m où le sol doit autoriser la poursuite du rendez-vous. Le véhicule agit seul ; il détermine sa position et sa vitesse relatives par rapport à la station, calcule et exécute les manœuvres. Les arrimages des 5 ATV ont été remarquables de précision (centimétrique), chaque ATV de 20 tonnes et se déplaçant à 28 000 km/h s’est arrimé, sans toucher au cône de guidage de la station, avec une précision meilleure que 10 cm.
Enfin dans le cadre de mission de planétologie, lorsqu’un robot a été déposé sur le sol, son déplacement est une aventure périlleuse et méticuleuse. Il faut s’assurer que l’atterrissage s’est bien passé, être capable de se repérer, et apprendre à connaître l’environnement (nature du sol, les obstacles …) avant de se déplacer. Les instruments à bord permettent de faire un panorama, l’exploitation au sol des données de dresser une carte précise du lieu, et seulement après, de commencer les actions de mobilité. On désigne le point à rejoindre, le véhicule établit le trajet puis entame son déplacement.
Le contexte spatial freine l’usage de la robotique
Ces opérations, qui peuvent paraître simples sur Terre, sont délicates dans l’espace et demandent une grande prudence. Plusieurs facteurs viennent freiner le développement de la robotique : le droit à l’erreur n’est pas acceptable, l’environnement spatial est agressif, la latence des communications peut atteindre plusieurs minutes.
Les distances sont aussi un frein à l’autonomie du véhicule spatial. Pour une mission comme Rosetta le temps de latence qui sépare l’émission d’une information de sa réception est d’environ 30 minutes. Lors de l’atterrissage du rover Curiosity sur la planète Mars en 2012, la réussite a été connue avec un retard de 17 minutes. Le temps réel n’existe pas et justifie d’une part une démarche pas à pas et d’autre part la lenteur des opérations de mobilité. Il n’est pas possible de réagir en temps réel si une difficulté survient.
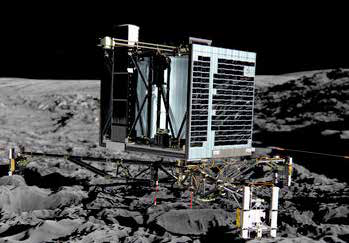
La sonde Rosetta : 30 minutes pour recevoir un signal
Un futur qui presse le spatial à davantage de robotique
Quelles perspectives pour le futur ? Le progrès spatial est en marche mais à son rythme. Les missions sont toujours plus ambitieuses. La pression sur les coûts ne cesse de se renforcer. Cela conduit à envisager davantage d’autonomie pour les véhicules spatiaux, le recours croissant aux composants commerciaux moins onéreux, plus performants et sans cesse plus robustes.
A quand un satellite intelligent triant la donnée pour ne conserver que celle utile, un satellite qui effectue en toute autonomie son maintien sur orbite, un véhicule capable de capturer des objets non coopératifs en orbite, des satellites qui coopèrent pour réaliser ensemble une mission (le vol en formation), des lanceurs réutilisables, des missions d’exploration robotique de longue durée sur Mars ou la Lune … Les ingénieurs préparent ce futur.
Auteur
Articles liés par des tags
-
- ETHIQUE DES ROBOTS : SANS LIMITESETHIQUE DES ROBOTS : SANS LIMITES La frontière entre l’acceptable et l’inacceptable est souvent dépendante des modes et des époques :...10 avril 2015Lire la suite >
-
- CONCEPTION DES ARMES ET VOLONTÉ SOCIALECONCEPTION DES ARMES ET VOLONTÉ SOCIALE De plus en plus, l’emploi des armements se décide et s’inscrit dans des situations où combats...11 avril 2015Lire la suite >
-
- PERMIS DE TUER ?PERMIS DE TUER ? Au cours de ses différentes affectations, l’auteur a appris à maîtriser la langue de bois tout en...12 avril 2015Lire la suite >
-
- « ROBOTS-TUEURS » : QUEL ENCADREMENT JURIDIQUE ?« ROBOTS-TUEURS » : QUEL ENCADREMENT JURIDIQUE ? L’organisation non-gouvernementale (ONG) Human Rights watch a lancé printemps 2013 une campagne de...13 avril 2015Lire la suite >
-
- GENTILS ROBOTS, MÉCHANTS ROBOTS ?GENTILS ROBOTS, MÉCHANTS ROBOTS ? Le 21ème siècle sera-t-il le siècle des robots ? de nombreux auteurs de science-fiction l’ont...15 avril 2015Lire la suite >
-
- SPIN-OFF DU LRBA À L’ORIGINE DE LA NAVIGATION MAGNÉTO-INERTIELLESPIN-OFF DU LRBA À L’ORIGINE DE LA NAVIGATION... En proposant des équipements de géolocalisation en environnement GPs-denied pour un coût 50 fois...16 avril 2015Lire la suite >
-
- FCAS, VERS L’ÈRE DES DRONES DE COMBAT ?FCAS, VERS L’ÈRE DES DRONES DE COMBAT ? Notifiée le 30 octobre 2014, la phase de faisabilité du projet fcas (Future Combat Air System)...17 avril 2015Lire la suite >
-
- LA GUERRE DES MINES NAVALESLA GUERRE DES MINES NAVALES Si, dans le domaine naval, les drones comprendront bien entendu des vecteurs aériens, une autre...18 avril 2015Lire la suite >
-
- CE QUE VEUT L’INTERNAUTECE QUE VEUT L’INTERNAUTE Le web moderne a vu les applications à la robotique et à l’intelligence artificielle exploser....19 avril 2015Lire la suite >
-
- EXPERTISE ROBOTIQUE TERRESTREEXPERTISE ROBOTIQUE TERRESTRE Depuis début janvier, nous sommes 14 IA (X 2010) à suivre notre formation administrative et...20 avril 2015Lire la suite >
-
- LE NAVAL AU SERVICE DU SPATIALLE NAVAL AU SERVICE DU SPATIAL Le Véhicule de transfert automatique (ATV) développé par l’agence spatiale européenne (ESA), est...22 avril 2015Lire la suite >
-
-
- ROSETTA & PHILAE, DEUX CONCEPTIONS TRÈS DIFFÉRENTESROSETTA & PHILAE, DEUX CONCEPTIONS TRÈS DIFFÉRENTES A plus de un milliard d’euros, le véhicule rosetta de plus de 3 tonnes est le fruit d’une...24 avril 2015Lire la suite >
-
- LE TRANSPORT EN 2050 : UN ESSAIM DE ROBOTS ?LE TRANSPORT EN 2050 : UN ESSAIM DE ROBOTS ? Que sera le transport en 2050 ? La voiture, si chère (dans tous les sens du terme) à bon nombre...25 avril 2015Lire la suite >
-
- QUELLE POLITIQUE INDUSTRIELLE POUR LA ROBOTIQUE ?QUELLE POLITIQUE INDUSTRIELLE POUR LA ROBOTIQUE ? Portée par un marché estimé à 100 milliards d’euros à l’horizon 2020, la robotique est au cœur de la...30 avril 2015Lire la suite >











Aucun commentaire
Vous devez être connecté pour laisser un commentaire. Connectez-vous.