

LA GUERRE DES MINES NAVALES
MOTEUR DU DÉVELOPPEMENT DES DRONES MOUILLÉS
Si, dans le domaine naval, les drones comprendront bien entendu des vecteurs aériens, une autre catégorie lui est bien plus propre. il s’agit des drones « mouillés » de surface, ou sous-marins. afin d’éloigner les équipages de la menace, le programme système de Lutte anti-mines futur (sLamf) compte faire usage de cette dernière catégorie pour assurer les fonctions opérationnelles de lutte contre les mines navales. Le contrat esPadoN a posé les bases de leur utilisation. des enseignements ont déjà été tirés. si, pour un robot, la fonction classique à développer est la fonction « voir et éviter », plusieurs autres enjeux à résoudre sont propres aux drones sous-marins et de surface pour la Guerre des mines.
Le Futur de la Guerre des Mines Navales
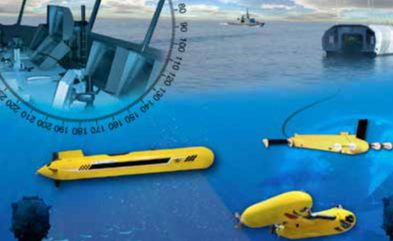
Aujourd’hui, la lutte contre les mines est conduite par des navires qui sont amenés à s’exposer et exposer leur équipage au danger en pénétrant dans la zone minée. En opérations extérieures, ces navires doivent aussi s’approcher des côtes adverses au risque d’être exposés à des menaces d’origine terrestre. La vision du programme Système de Lutte Anti-Mines Futur (SLAMF), premier programme naval français à vouloir intégrer des drones « mouillés », de surface ou sousmarins, à grande échelle, est de construire une architecture qui maintient l’équipage en sécurité, d’obtenir un dimensionnement performant en termes de résultat opérationnel, de bâtir une capacité projetable, modulaire et efficace contre les nouvelles menaces.
La flottille de navires très spécialisés existante (en particulier les chasseurs de mines, porteurs de sonars de coque), pourrait ainsi être remplacée par des modules de détection et de neutralisation à distance des mines. Ces modules seraient déployés à partir de navires porteurs, plus simples et opérants à distance.

Vision de l’utilisation des drones mouillés dans le contexte du programme SLAMF
La France n’est pas la seule à vouloir accomplir cette transformation. Doter les forces d’une capacité robotisée de lutte contre les mines navales est un défi technique et opérationnel nécessitant un partage des risques au travers de la communauté internationale de défense. À cette fin, le programme est un enjeu de coopération. Aujourd’hui, la France et la GrandeBretagne ont souhaité relever ce challenge ensemble en lançant l’étude, le développement et la qualification d’un système de drones via l’OCCAR.
De l’automate au robot et de la discussion autour du rôle des opérateurs
Les études préliminaires menées en France et au sein de l’Agence Européenne de Défense ont montré que les drones navals étaient attendus pour sécuriser les personnels en opération, exécuter des tâches fastidieuses ou à faible valeur ajoutée. Ils offrent potentiellement une économie de ressources humaines et une permanence en opération sur trois scénarios principaux : protection des approches maritimes des ports militaires et civils, passages de détroit et opérations de projection de type amphibie.
L’automatisation des tâches de chasse aux mines implique une évolution des doctrines opérationnelles. La simulation et l’expérimentation technico-opérationnelle s’avèrent indispensables afin de préciser les concepts d’emploi avec leur levée de risques.
Les technologies prises individuellement semblent être matures. Il est possible de programmer les engins et de réaliser automatiquement des relevés de fonds puis de coordonner l’action d’un engin d’intervention.

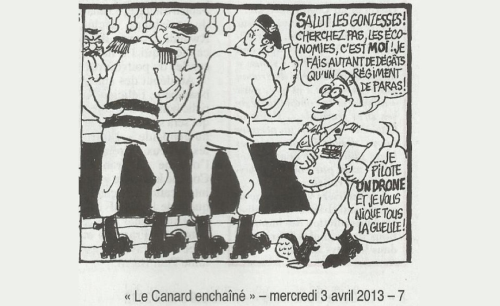
Drone sous-marin faisant surface
Après le développement des premiers automates maritimes, en intégrant de plus en plus d’intelligence, le domaine évolue progressivement vers des robots à part entière. De fait, suite à l’emploi de drones, à la transformation des concepts d’emploi, voire à la nécessaire évolution des compétences pour leur mise en œuvre, certaines difficultés d’ordre psychologique apparaissent. D’autres complications découlent du vide juridique lié à la responsabilité d’emploi et par les contraintes règlementaires à venir concernant la sécurité maritime et l’autorisation de navigabilité de ces équipements. Au-delà du développement de la fonction « voir et éviter », caractéristique de tout robot, de surface, aérien ou naval, certains enjeux spécifiques aux drones sous-marins de lutte contre les mines restent à maîtriser.
D’abord, il est essentiel de situer les drones dans les systèmes dont ils relèvent et dans l’environnement dans lequel ils évoluent. À ce titre, la proportion entre la télé-opération, l’automatisation, l’autonomie décisionnelle complète, la coopération système habité / robot et la coopération multi-robots est d’une importance toute particulière. Dans cette optique la récupération automatique d’un engin par un autre nécessite une attention toute particulière.
Ensuite, les difficultés liées à l’établissement de communications robustes haut débit et discrètes à longue distance (notamment en sous-marin) militent pour une intelligence embarquée et une interprétation très automatisée des données recueillies. Cela étant, l’intelligence artificielle a des limites et une stratégie hybride reste à établir et valider entre la nécessité de contrôle des données par un opérateur humain et la confiance que l’on peut apporter au système automatique luimême.
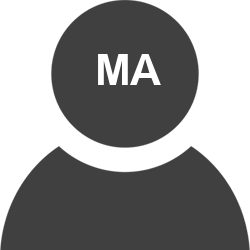
Enfin, le dernier point concerne les difficultés de positionnement sous-marin (pas de GPS sous-marin). Lors d’une recherche, l’objet est localisé avec une certaine précision. Il devra être relocalisé avant d’effectuer l’intervention. Ce processus de localisation devra être partagé intelligemment au travers d’une coopération multi-robots hétérogènes : un premier qui procède à la recherche, l’autre qui procède à l’intervention.
À ce jour, la stratégie retenue est de maintenir l’opérateur au cœur de l’action et de définir l’architecture hybride répondant le mieux aux exigences de la mission en terme de planification, prise de décision, supervision, contrôle d’exécution et suivi de situation.
 ESPADON : Evaluation de Solutions Potentielles d’Automatisation du Déminage des Opérations Navales
ESPADON : Evaluation de Solutions Potentielles d’Automatisation du Déminage des Opérations Navales
Pour répondre au besoin exprimé par les opérationnels, une architecture fondée sur un système de drones mouillés a été proposée : un navire dédié à la lutte contre les mines reste à distance de sécurité de la menace et déploie, opère puis récupère des drones de surface conçus pour opérer dans le champ de mines et tracter des sonars latéraux ou déployer et opérer des robots sous-marins qui forment ainsi la troisième composante de cette architecture. Le contrat « ESPADON » a été passé à un consortium français, constitué des sociétés DCNS, TUS et ECA, pour étudier, réaliser et évaluer un démonstrateur technologique et « dé-risquer » ainsi le lancement du programme SLAMF, encore aujourd’hui au stade d’orientation.
Drone de surface Sterenn Du, pièce maîtresse du contrat ESPADON, tractant une drague à influence magnétique et acoustique lors des essais conduits à Brest, en 2013, dans le cadre d’une étude avec l’Agence Européenne de Défense (AED)
Ces travaux ont permis d’apprécier le niveau de maturité technologique des briques élémentaires constituant l’architecture. Par exemple, des résultats remarquables ont été obtenus comme la récupération automatique par mer formée d’un drone sous-marin autonome par un drone de surface lui-même autonome, l’ensemble étant supervisé depuis la terre à une distance de plusieurs nautiques. Au-delà de ces résultats, ces travaux ont aussi permis de prendre conscience de la complexité d’ensemble de ce système de systèmes et d’ouvrir la voie à la recherche de pistes d’améliorations et de simplification, nécessaires à l’obtention d’une solution robuste et opérationnelle. Cette optimisation est engagée à travers la spécification fonctionnelle établie pour la réalisation du prototype de système de drones franco-britannique.
 |
Alain Hetet, IPETA
Alain Hetet, ingénieur ENSIETA et docteur de l’université Pierre et Marie Curie, a effectué une carrière essentiellement au service de la guerre des mines navales. Il a été l’architecte et le manageur du programme SLAMF et des études amont associées.
|
 |
Maud Amate, IPA
Ingénieur ENSIETA, diplomée d'un MSc en traitement d'image et du signal (Cranfield University, UK), Maud Amate, a débuté sa carrière à DGA/GESMA. Depuis janvier 2010, elle assume la fonction d’Architecte Système de Combat Naval du programme Système de Lutte Anti-Mines Futur.
|
Auteurs
Articles liés par des tags
-
- LA ROBOTIQUE DÉVELOPPEMENTALELA ROBOTIQUE DÉVELOPPEMENTALE La robotique développementale s’inspire de travaux en biologie et en psychologie du développement...05 avril 2015Lire la suite >
-
- APPRENDRE POUR ÊTRE ENCORE PLUS HUMANOÏDEAPPRENDRE POUR ÊTRE ENCORE PLUS HUMANOÏDE Pour sortir des laboratoires où ils sont aujourd’hui cantonnés et venir s’installer chez nous, les...06 avril 2015Lire la suite >
-
- DES ROBOTS QUI COOPÈRENT ENTRE-EUX !DES ROBOTS QUI COOPÈRENT ENTRE-EUX ! La robotique est née à la fin des années 60 des travaux menés à l’université de stanford visant à...08 avril 2015Lire la suite >
-
- ETHIQUE DES ROBOTS : SANS LIMITESETHIQUE DES ROBOTS : SANS LIMITES La frontière entre l’acceptable et l’inacceptable est souvent dépendante des modes et des époques :...10 avril 2015Lire la suite >
-
- CONCEPTION DES ARMES ET VOLONTÉ SOCIALECONCEPTION DES ARMES ET VOLONTÉ SOCIALE De plus en plus, l’emploi des armements se décide et s’inscrit dans des situations où combats...11 avril 2015Lire la suite >
-
- PERMIS DE TUER ?PERMIS DE TUER ? Au cours de ses différentes affectations, l’auteur a appris à maîtriser la langue de bois tout en...12 avril 2015Lire la suite >
-
- « ROBOTS-TUEURS » : QUEL ENCADREMENT JURIDIQUE ?« ROBOTS-TUEURS » : QUEL ENCADREMENT JURIDIQUE ? L’organisation non-gouvernementale (ONG) Human Rights watch a lancé printemps 2013 une campagne de...13 avril 2015Lire la suite >
-
- GENTILS ROBOTS, MÉCHANTS ROBOTS ?GENTILS ROBOTS, MÉCHANTS ROBOTS ? Le 21ème siècle sera-t-il le siècle des robots ? de nombreux auteurs de science-fiction l’ont...15 avril 2015Lire la suite >
-
- SPIN-OFF DU LRBA À L’ORIGINE DE LA NAVIGATION MAGNÉTO-INERTIELLESPIN-OFF DU LRBA À L’ORIGINE DE LA NAVIGATION... En proposant des équipements de géolocalisation en environnement GPs-denied pour un coût 50 fois...16 avril 2015Lire la suite >
-
- FCAS, VERS L’ÈRE DES DRONES DE COMBAT ?FCAS, VERS L’ÈRE DES DRONES DE COMBAT ? Notifiée le 30 octobre 2014, la phase de faisabilité du projet fcas (Future Combat Air System)...17 avril 2015Lire la suite >
-
- CE QUE VEUT L’INTERNAUTECE QUE VEUT L’INTERNAUTE Le web moderne a vu les applications à la robotique et à l’intelligence artificielle exploser....19 avril 2015Lire la suite >
-
- EXPERTISE ROBOTIQUE TERRESTREEXPERTISE ROBOTIQUE TERRESTRE Depuis début janvier, nous sommes 14 IA (X 2010) à suivre notre formation administrative et...20 avril 2015Lire la suite >
-
- SANS LA ROBOTIQUE, PAS DE SPATIALSANS LA ROBOTIQUE, PAS DE SPATIAL Les lanceurs, les satellites ou les sondes interplanétaires possèdent tous des senseurs, des...21 avril 2015Lire la suite >
-
- LE NAVAL AU SERVICE DU SPATIALLE NAVAL AU SERVICE DU SPATIAL Le Véhicule de transfert automatique (ATV) développé par l’agence spatiale européenne (ESA), est...22 avril 2015Lire la suite >
-
-
- ROSETTA & PHILAE, DEUX CONCEPTIONS TRÈS DIFFÉRENTESROSETTA & PHILAE, DEUX CONCEPTIONS TRÈS DIFFÉRENTES A plus de un milliard d’euros, le véhicule rosetta de plus de 3 tonnes est le fruit d’une...24 avril 2015Lire la suite >
-
- LE TRANSPORT EN 2050 : UN ESSAIM DE ROBOTS ?LE TRANSPORT EN 2050 : UN ESSAIM DE ROBOTS ? Que sera le transport en 2050 ? La voiture, si chère (dans tous les sens du terme) à bon nombre...25 avril 2015Lire la suite >
-
- QUELLE POLITIQUE INDUSTRIELLE POUR LA ROBOTIQUE ?QUELLE POLITIQUE INDUSTRIELLE POUR LA ROBOTIQUE ? Portée par un marché estimé à 100 milliards d’euros à l’horizon 2020, la robotique est au cœur de la...30 avril 2015Lire la suite >













Aucun commentaire
Vous devez être connecté pour laisser un commentaire. Connectez-vous.